
2022.10.19
ヘビ型ロボット開発による廃炉支援 ~高放射線量下領域への挑戦~
当社は東日本大震災以降、福島第一原子力発電所の廃炉作業支援のため、遠隔操作機器ロボットの開発を進めています。
これまで、高放射線量下領域の立入困難な場所で現場調査できる遠隔操作式高所点検ロボット等を開発し実用化されています。さらに、現在、狭隘部で活用できるロボットを、国立大学法人電気通信大学の田中基康教授と㈱カナエ殿の協力のもと開発しています。
このロボットの動きは特殊であり、前の駆動輪の軌跡を後続の駆動輪が同じ軌跡をたどる動きをします。駆動系は、前進後進するための車輪部、水平方向の関節部、上下方向の関節部で構成されており、そのすべてにモーターが配置され回転角度(回転数)を制御しているためヘビのような動きになっています。この動きにより、内輪差が無くなり湾曲している狭隘部でも前進後進が可能となります。
制御方法は、無線制御も可能ですが、現状は狭隘部をターゲットにしており、通信状態の信頼性向上が重要であることから、有線制御がベストであると判断し開発を進めています。それにより、バッテリーの搭載スペースや制御用PCの搭載スペースが削減でき、本体の小型化が可能となったことから、150A(6インチ)の配管内を移動できるサイズで開発ができました。
また、現状、搭載機器は小型カメラを前後に積んで前方後方の視認ができるようになっていますが、今後は、360度カメラ、線量計、無線中継器等の搭載も考えています。
加えて、このロボットの特徴的な動きの1つとして、ロボット全長の60%程度の高さの昇降が可能で、条件が整えば1m位の段差の対応が可能となります。
現場の状況によってサイズ・制御方法等を検討し、カスタマイズすることで、最適な形を提案できると考えています。
ヘビ型ロボットの開発責任者は、「開発にあたり、本体の小型化や電源・通信・Web用などの各種ケーブルをどのように配置するかなどの課題がありましたが、試行錯誤を重ねながら一つ一つ解決しています。今後も廃炉支援をしていきたい」と語っています。
当社は、引き続き多様な作業環境に対応できるように新たな視点での取り組みを進め、今後とも廃炉推進に貢献すべく、高放射線量下エリアでの作業ロボットの開発に挑戦していきます。
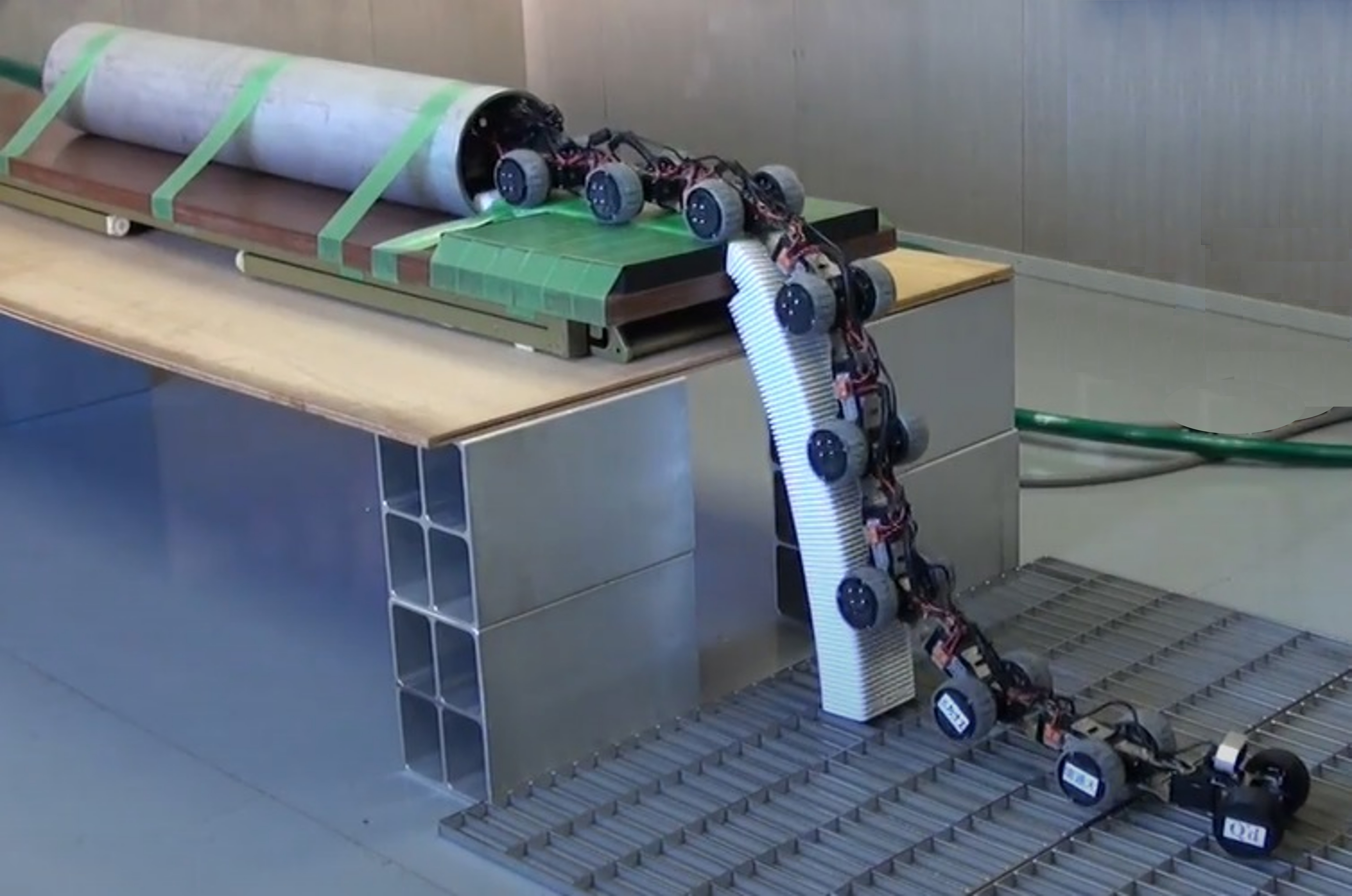
〔開発中のヘビ型ロボット〕
※参考
・遠隔操作システム搭載 高所点検ロボット



